








W artykule zaprezentowano wybrane czynniki mające wpływ na dokładność i powtarzalność pozycjonowania robota przemysłowego. Stanowisko badawcze zostało wyposażone w manipulator z zainstalowanym triangulacyjnym czujnikiem pomiarowym. Prezentowane zagadnienie jest elementem szerszego programu badań, których celem jest oszacowanie zdolności pomiarowych zbudowanego stanowiska i estymacja niepewności pomiaru cech geometrycznych rzeczywistych wyrobów. Stanowisko i badania wykonano w Katedrze Technologii Maszyn i Automatyzacji ATH.
Dla konkretnego zastosowania robot staje się użyteczny dopiero wówczas, gdy zostanie wyposażony w odpowiednie narzędzia, którymi wykonuje przewidziane czynności technologiczne na obrabianych przedmiotach. Kwestią decyzyjną o zastosowaniu danego typu manipulatora do przewidzianych prac jest deklarowana przez producenta dokładność i powtarzalność pozycjonowania.
Dotychczas opisano i zbadano wiele czynników mających wpływ na te dwa parametry. Podejmowane są prace mające za zadanie wskazać procentowy wpływ niepożądanych zjawisk na ostateczną dokładność [7, 10, 11].
Ideą dla zbudowania prezentowanego stanowiska pomiarowego była możliwość inspekcji cech geometrycznych wyrobów (pomiar płaszczyzny, pomiar średnic otworów w wyrobach, pomiar średnic wałów, pomiar długości) w warunkach warsztatowych.
Inspekcji dokonuje triangulacyjny czujnik pomiarowy, który jest pozycjonowany w żądanych punktach pomiarowych za pomocą ruchu ramienia robota. Wielkości do dalszych estymacji dostarczane są z kontrolera czujnika pomiarowego w postaci chmury punktów. Dla tego typu zastosowania kluczową kwestią jest dokładność uzyskiwanych wyników, na którą ma wpływ dokładność ruchów realizowanych przez robota.
Dokładność i powtarzalność nawet dla konkretnego modelu robota nie jest stałą cechą. Te dwa parametry zależą od wielu czynników zdeterminowanych zarówno charakterem pracy wykonywanej przez manipulator, jak również długością i intensywnością jego eksploatacji.
W niniejszym opracowaniu zostaną opisane najważniejsze czynniki mające wpływ na powtarzalność i dokładność pozycjonowania sześcioosiowego manipulatora współpracującego z triangulacyjnym czujnikiem pomiarowym. Zostaną podane konkretne rozwiązania jakie zostały powzięte w celu zwiększenia dokładności pozycjonowania dla tak powstałego urządzenia pomiarowego.
2. Stanowisko badawcze
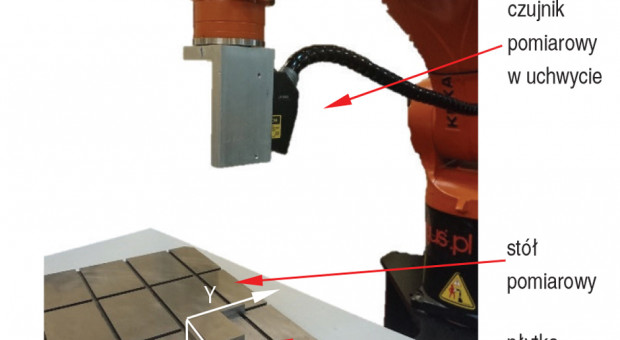
Stanowisko badawcze zostało zbudowane w Katedrze Technologii Maszyn i Automatyzacji ATH. Jego dokładny opis wraz z opisem metody kalibracji punktu TCP czujnika pomiarowego znajduje się w pracy [2]. Stanowisko (rys. 1) stanowi sześcioosiowy manipulator przemysłowy KR 6 R900 AGILUS, wyposażony w kontroler KR C4 oraz dotykowy smartPAD.
Urządzeniem mierzącym jest triangulacyjny czujnik pomiarowy LK-H152 sterowany przez kontroler LK-G5001P. Dostęp do parametrycznej konfiguracji odczytów lasera oraz wizualizację i zarządzanie wynikami pomiarów umożliwia pakiet LK-Navigator 2, zainstalowany na PC. Sercem całego stanowiska badawczego jest kompaktowy sterownik PLC SIMATIC S7-1200, wyposażony dodatkowo w opcjonalne moduły komunikacyjne PROFIBUS i RS-232. Program zapisany w sterowniku PLC zapewnia synchronizację pomiędzy programem pozycjonującym robota a zapisem danych pochodzących z kontrolera LK-G5001P. Wymienny element stanowiska to przedmiot, którego cecha geometryczna aktualnie podlega pomiarowi.
Za wyborem trybu pracy, w którym robot porusza narzędziem pomiarowym a mierzony przedmiot jest nieruchomy, przemawia podstawowa zaleta - czujnik pomiarowy jest lekki (ok. 0,47 kg) i może być bez problemu pozycjonowany w miejscach inspekcji. Dzięki temu rozwiązaniu można poddawać weryfikacji przedmioty o dowolnej masie. Wybór rozwiązania z nieruchomym narzędziem (ang. fixed tool) skutkowałby brakiem możliwości wykonania pomiarów detali, których masa przekracza obciążenie nominalne robota (6 kg). Dodatkowym minusem dla rozwiązania z nieruchomym narzędziem byłby problem występujący podczas mierzenia przedmiotów o różnych masach. Wtedy pojawiałby się niekorzystny czynnik związany ze zmieniającą się dokładnością i powtarzalnością pozycjonowania w zależności od masy mierzonego przedmiotu.
3. Dokładność i powtarzalność pozycjonowania
Jednymi z podstawowych parametrów opisującymi możliwości dokładnego wykonania zadania przez robot przemysłowy są dokładność i powtarzalność pozycjonowania. Parametry te są badane i podawane przez producentów robotów zgodnie z wytycznymi normy PN-EN ISO 9283 : 2003 [13] (niewielu autorów publikacji podaje, że norma ta została wycofana w marcu 2012 r. i dotychczas nie doczekała się wznowienia).
W celu przeprowadzenia badań, spełnionych musi zostać wiele kryteriów, do których należą min: - odpowiedni sposób zamocowania manipulatora do podłoża (określony przez producenta danego modelu), - odpowiednia masa obciążająca flanszę robota (zainstalowanie obciążenia znamionowego), - odpowiedni sposób rozmieszczenia punktów pomiarowych (punkty powinny pokrywać jak największy sześcian w przestrzeni roboczej), - szybkość ruchów pomiędzy punktami pomiarowymi (parametry ruchu, tj. przyspieszenie, prędkość, powinny mieć maksymalną wartość), - pozycję flanszy robota w kolejnych punktach pomiarowych bada się zewnętrznymi przyrządami pomiarowymi, jak laser tracker czy interferometr. Ten ostatni zapewnia najbardziej precyzyjne pomiary, jednak w danym ustawieniu robota jest w stanie badać tylko jedną współrzędną, dlatego też pomiary dla każdego punktu należy przeprowadzić trzykrotnie, aby uzyskać wszystkie współrzędne.
Istotną kwestią jest też stabilizacja termiczna przegubów manipulatora. Pozwala przekładniom dla poszczególnych osi i ich czynnikowi smarującemu osiągnąć odpowiednią temperaturę.
Dzięki rozszerzalności cieplnej następuje kompensacja luzów, dlatego też ruchy mogą być bardziej "gładkie", z mniejszym ryzykiem występowania mikroszarpnięć.
Dokładnością całkowitą AP (ang. position accuracy) robota przemysłowego dla zadanej pozycji jest odległość pomiędzy tą zadaną pozycją a średnią z wszystkich uzyskanych podczas dojazdu punktów. Jest to tzw. dokładność jednokierunkowa, ponieważ najazd na określone punkty dokonywany jest zawsze z tego samego kierunku.
Powtarzalność dla robota przemysłowego RP (ang. position repeatability) może być określona jako promień najmniejszej sfery obejmującej wszystkie kolejno uzyskane pozycje najazdowe.
Na rysunku 2 przedstawiono odwzorowanie zależności między dokładnością a powtarzalnością. Parametry AP i RP mogą pozostawać względem siebie w dowolnych relacjach. Urządzenie może być dokładne, ale wykonywać pozycjonowanie ze słabą powtarzalnością, lub powtarzalność może być zadowalająca, ale dokładność już nie. Sytuacja idealna byłaby wówczas, gdyby robot był w stanie w sposób powtarzalny, za każdym razem dokładnie osiągać zadaną pozycję. Jednak dla robotów przemysłowych przyjmuje się, że dokładność jest znacząco gorsza od powtarzalności [6, 7]. Dla modelu robota KR900 wykorzystanego w opisywanych badaniach dokładność AP podana przez producenta wynosi 0,6 mm, natomiast powtarzalność RP wynosi 0,03 mm [5].
Założenia normy [13] są bardzo restrykcyjne. W rzeczywistych warunkach rzadko wykorzystuje się roboty przemysłowe do przenoszenia ciężarów o wartości nominalnego udźwigu (ang. payload). Rzadko też używana jest cała przestrzeń robocza manipulatora [6]. Zazwyczaj robot przez większość czasu eksploatacji pracuje w pewnym fragmencie swojej całkowitej przestrzeni roboczej. Podobnie sytuacja przedstawia się z prędkościami i przyspieszeniami. W zależności od wytycznych technologii procesu realizowanego przez manipulator, dobiera się prędkości, które czasami są niewielkim ułamkiem prędkości maksymalnej. Przykładem może być nakładanie przez robota ścieżki silikonu za pomocą pistoletu. Również w przypadku zastosowania robota, jak to ma miejsce w opisanym stanowisku badawczym [2], czujnik pomiarowy podczas procesu mierzenia musi być prowadzony z niewielkimi wartościami prędkości. Nasuwa się następujące pytanie - czy wykorzystując tylko niewielki procent wartości maksymalnej poszczególnych parametrów z danych technicznych manipulatora (obciążenie, prędkość, przestrzeń robocza), można poprawić dokładność i/ lub powtarzalność pozycji? A jeśli tak, to jak dużej poprawy należy się spodziewać?
4. Wybrane czynniki mające wpływ na dokładność i powtarzalność
Jedną ze znaczących przyczyn wpływających na dokładność jest położenie punktu TCP narzędzia i umiejscowienie przedmiotu obrabianego [11]. Czynnik ten nie ma jednak wpływu na powtarzalność pozycjonowania robota. Uważa się, że najmniej istotnym czynnikiem wpływającym na dokładność pozycjonowania jest rozdzielczość enkoderów położenia przegubów poszczególnych osi. Obecnie produkowane enkodery charakteryzują się bardzo dużą rozdzielczością określającą pozycję.
W literaturze spotyka się metodę analizy przyczynowo- -skutkowej (ang. cause and effect diagram, fishbone diagram, Ishikawa diagram). W tej metodzie poszukuje się przyczyn dla zaistniałego skutku pewnego działania. Twórcą tego typu analizy był japoński chemik i statystyk Ishikawa. Forma graficzna analizy przypomina rybi szkielet, dlatego też opisowo metoda została nazwana właśnie "fishbone".
Opierając się na wyżej opisanej metodzie, opracowano na podstawie dostępnych prac [7, 9, 12] diagram Ishikawy zawierający kluczowe składowe mające wpływ na całkowitą dokładność pozycjonowania robota przemysłowego (rys. 3). Źródła błędów podzielono na trzy podstawowe grupy: kinematyka (przyczyny związane z ruchem manipulatora w przestrzeni pracy), dynamika (przyczyny związane z obciążeniem manipulatora) oraz konstrukcja (przyczyny pochodzące od elementów składowych konstrukcji). Dla każdej z trzech grup wymieniono czynniki wpływające na ostateczny efekt, jakim jest dokładność pozycjonowania.
4.1. Kalibracja robota
Analiza literatury wykonana w pracy [9] pokazuje, że autorzy na podstawie własnych badań w różnej kolejności tworzą hierarchię wpływu czynników na dokładność pozycjonowania.
Bezsprzeczną kwestią jest odpowiednia kalibracja położenia przegubów manipulatora. Brak kalibracji, lub jej niewłaściwe wykonanie są odpowiedzialne za 80-90% błędów powstałych podczas pozycjonowania efektora [10].
Kalibracja ma za zadanie przekazania do układu sterowania informacji na temat położenia zerowego enkoderów zamontowanych na wałkach silników napędzających poszczególne osie. Kalibrację dla opisywanego w pracy manipulatora KR900 okresowo wykonuje się za pomocą czujnika EMD (ang. Electronic Measurement Device), zgodnie z procedurą określoną przez producenta robota [4]. Wewnętrzny algorytm sterownika KR C4 podczas wykonywania procesu kalibracji kontroluje wyniki otrzymane dla poszczególnych osi robota. Jeśli błąd kalibracji dla jakiejkolwiek osi będzie poza tolerancją narzuconą przez producenta, sterownik zakończy kalibrację z wynikiem negatywnym. Następstwem tego konieczna będzie diagnoza błędów (potencjalna wymiana toru pomiarowego pozycji, wymiana silnika bądź przekładni).
4.2. Kalibracja TCP narzędzia
Robot może współpracować z całą gamą różnorodnych narzędzi (chwytaki, dysze podciśnieniowe, spawarki MIG/ MAG, czujniki laserowe, kamery z systemami wizyjnymi).
Dla każdego narzędzia należy odpowiednio zidentyfikować punkt TCP, oraz opracować i przeprowadzić procedurę kalibracji.
Kalibracja narzędzia, jakim jest triangulacyjny czujnik pomiarowy (rys. 4) dla opisywanego stanowiska badawczego została szczegółowo opisana w pracy [2]. Na TCP narzędzia wybrano wirtualny punkt znajdujący się w osi promienia lasera w odległości referencyjnej. Warto nadmienić, że dla celów dokonania kalibracji TCP czujnika pomiarowego w Katedrze Technologii Maszyn i Automatyzacji ATH zaprojektowano i przetestowano dedykowany do tego zadania detektor promienia laserowego [2].
4.3. Uchyb regulacji napędu osi
Jednym ze źródeł istnienia skończonej dokładności i powtarzalności pozycjonowania jest sposób sterowania silnikami poszczególnych osi robota. Silniki sterowane są w zamkniętej pętli ujemnego sprzężenia zwrotnego (rys. 5). Sygnał zwrotny o aktualnej pozycji w jakiej znajduje się wał wirnika silnika, jest z enkodera poprzez kartę pomiarową kierowany do węzła sumującego regulatora PID. Regulator PID oblicza wartość uchybu jako różnicę między pożądaną wartością zadaną i zmierzoną wartością zmiennej należącej do procesu. Regulacja PID działa w taki sposób, by zredukować uchyb poprzez odpowiednie dostosowanie sygnału podawanego na wejście regulowanego obiektu.
Algorytm obliczeń regulatora PID zawiera trzy oddzielne, stałe elementy: proporcjonalny (P), całkujący (I) i różniczkujący (D). Działanie tych członów w odniesieniu do czasu interpretuje się następująco: - człon proporcjonalny (ang. proportional term) kompensuje uchyb bieżący, - człon całkujący (ang. integral term) kompensuje akumulację uchybów z przeszłości sumując w czasie błędy pozycji, - człon różniczkujący (ang. derivative term) kompensuje przewidywane uchyby w przyszłości.
Ważona suma tych trzech działań stanowi podstawę sygnału podawanego na człon wykonawczy (ang. inverter) w celu regulacji procesu. W przypadku sterowania silnikiem synchronicznym, regulator PID porównując informację pochodzącą z enkodera o aktualnym położeniu (im rozdzielczość enkodera wyższa, tym większa możliwość osiągnięcia dokładnej pozycji), prędkości i przyspieszeniu z wartościami zadanymi dla danego ruchu, ma za zadanie tak pokierować przebiegiem procesu regulacji, aby błąd uchybu regulacji był jak najmniejszy (zgodność rzeczywistej trajektorii z pozycjami obliczonymi z teoretycznego modelu manipulatora). Z uchybem regulacji bezpośrednio wiąże się aspekt, że robot nie osiąga w sposób idealny zadeklarowanej pozycji. Biorąc pod uwagę, że zaistniałe zjawisko zostało opisane dla regulacji położenia jednej osi, to w przypadku manipulatora sześcioosiowego błędy od poszczególnych osi zwielokrotniają niekorzystne skutki.
4.4. Nieprawidłowe parametry ruchu
Użytkownik w pewnym zakresie ma wpływ na dokładność ruchów wykonywanych przez robota. W instrukcjach ruchu można sterować współczynnikiem prędkości i przyspieszenia.
Oznacza to, że liczba wpisana tam jako parametr, odzwierciedla współczynnik prędkości lub przyspieszenia, z jakim nominalnie porusza się końcówka interfejsu mechanicznego. Liczba ta określa na ile wykorzystujemy maksymalną szybkość lub przyspieszenie ruchu. Im bardziej zbliżamy się do wartości maksymalnych, z tym większymi błędami będzie następowało pozycjonowanie. Kwestią jest kompromis pomiędzy szybkością wykonywanych pomiarów a dokładnością osiągania zadanej pozycji. Szybsze rampy hamowania (ang. braking ramp) ruchów (zależność szybkości wytracania prędkości od czasu) sprzyjają wzrostowi błędów dokładności pozycjonowania.
Na opisywanym stanowisku badawczym wartości parametrów ruchu dobrane zostały w sposób doświadczalny, aby zminimalizować zjawisko drgań po zatrzymaniu robota w zadanej pozycji pomiarowej.
4.5. Podatność ramion - drgania
Zbyt gwałtowne zahamowanie (np. zatrzymanie awaryjne z powodów zadziałania systemu bezpieczeństwa) zazwyczaj kończy się opuszczeniem zaprogramowanej trajektorii ruchu, co skutkuje błędem nadzoru nad konturem ścieżki przejazdu. Dlatego też hamowanie w normalnych warunkach pracy odbywa się stopniowo, w sposób płynny. W tym czasie układ regulatora PID dla każdej osi robota musi zatrzymać jej ruch według pewnego zadanego zbocza narastania prędkości i przyspieszenia.
Sygnały zwrotne z enkoderów na bieżąco podają aktualną pozycję i w momencie znajdowania się dostatecznie blisko wartości zadanej następuje zatrzymanie. W tym czasie konstrukcja robota ma tendencję do drgań związanych w wykonywanym ruchem, przy czym amplituda drgań jest tym większa im większe było przyspieszenie ruchu i obciążenie interfejsu mechanicznego robota. Wiąże się to z bezwładnością narzędzia, które dla coraz większych mas, bardziej dąży do poruszania się po zadanej ścieżce ruchu, pomimo jego zatrzymania. Jeśli dodatkowo robot nie jest zainstalowany na sztywnym podłożu (niezgodnie z zaleceniami producenta), lecz podłoże ma tendencję do odkształceń, tym efekt powodujący drgania będzie narastał.
Podatność ramienia robota składa się z podatności jego członów oraz sprężystej podatności w przegubach (ta uwarunkowana jest podatnością mechanizmów przekładniowych) [6].
W zależności od typu manipulatora zastosowanego w badaniach, ten wpływ na dokładność jest różny. Dla manipulatora zastosowanego w badaniach oszacowano czas relaksacji [1], po którym osiągane wyniki mieszczą się w zakresie oczekiwanej dokładności pomiaru.
4.6. Obciążenie członów robota
Zainstalowanie narzędzia na flanszy robota oraz dodatkowych komponentów na obudowach poszczególnych ramion (najczęściej zabudowie poddaje się ramię czwartej osi obrotowej) stanowi dodatkowe obciążenie, które należy uwzględnić w modelu matematycznym manipulatora. Układ regulacji osi powinien mieć poprawne informacje o dodatkowych masach, aby poprawnie sterował pracą poszczególnych silników. W tym celu w programie CAD stworzono model 3D narzędzia, parametryzując jego właściwości fizyczne (gęstość materiału, wymiary geometryczne) [3]. Następnie program CAD oblicza położenie środka ciężkości dla tak utworzonego modelu oraz osiowe momenty bezwładności. Uzyskane wyniki deklaruje się w danych maszynowych manipulatora. W opisywanym przypadku masa czujnika pomiarowego wraz z uchwytem (0,47 kg) stanowi niewielki procent znamionowego obciążenia robota (dopuszczalnie 6 kg). Doświadczenie pokazuje, że im większe obciążenie robota, tym mniej dokładne staje się pozycjonowanie TCP narzędzia w zadanych punktach.
5. Badania
W rzeczywistych warunkach użytkowania robota najczęściej zachodzi sytuacja, gdy nieruchomy robot uruchamiany jest np. na początku zmiany produkcyjnej i od razu rozpoczyna cykl pracy, wymagający zapewnienia określonej powtarzalności pozycji. Nie przeprowadza się tzw. wstępnego rozgrzewania (ang. dry cycle) mającego pomóc w zapewnieniu stabilizacji termicznej przegubów manipulatora. Dlatego też badania stanowiskowe opisane w artykule były przeprowadzone mając za zadanie odwzorować rzeczywisty charakter eksploatacji manipulatora.
Opisane badania mają za zadanie pokazać, jakiej dokładności i powtarzalności robota można spodziewać się dla warunków mniej restrykcyjnych niż wytyczne normy [13], natomiast wykonywanych dla określonych parametrów ciągłej pracy stanowiska. Dlatego też obok obliczonych parametrów AP* oraz RP* użyto symbolu (*).
Wybrano kilka prędkości, dla których badano parametry dokładności i powtarzalności. Podzielono je umownie na prędkości najazdowe, które mogą być stosowane podczas przemieszczania robota pomiędzy pośrednimi punktami pomiarowymi (prędkości: 1 m/s, 1,5 m/s) oraz prędkości pomiarowe, w których ruch powinien być spowolniony, aby stało się możliwe dokładnie odnotowanie np. zdarzenia INTERRUPT, które miało miejsce na pokonywanym dystansie (prędkości: 0,01 m/s, 0,05 m/s).
5.1. Schemat doświadczenia
W celu weryfikacji dokładności i powtarzalności zastosowanego robota przemysłowego dla różnych prędkości najazdowych, wykonano następujący eksperyment. Badania przeprowadzono w tym fragmencie całkowitej przestrzeni roboczej manipulatora, w którym dokonuje on inspekcji na mierzonych przedmiotach.
Badania przeprowadzono zgodnie z rysunkiem 7. Przesuw następował tylko w wirtualnej osi Z (od wartości 100 mm do 0,0 mm) układu współrzędnych przedmiotu mierzonego.
Wartości pozostałych osi X, Y oraz kąty A, B, C, pozostały niezmienne. Wybrano rodzaj ruchu LIN, który realizuje ruch liniowy pomiędzy dwoma zadanymi punktami P1 i P2. Dla każdej wybranej prędkości posuwu wykonano 30 powtórzeń.
5.2. Formuły obliczeń
Dla zebranych danych, obliczanie uzyskanej dokładności AP* przebiegło zgodnie z wzorem (1) [9, 14]:

gdzie poszczególne składowe APx, APy, APz obliczane są z zależności (2):

Średnia arytmetyczna (ang. arithmetic mean) dla kolejnych zmierzonych pozycji (3):

W powyższych formułach znaczenie zmiennych jest następujące: - x,y,z - średnia arytmetyczna współrzędnych w poszczególnych osiach dla punktów uzyskanych w wyniku wykonania n najazdów do położenia zadanego, - xc, yc, zc - współrzędne dla położenia zadanego, - xj, yj, zj - współrzędne położenia dla j-tego ruchu do położenia zadanego.
Uzyskaną powtarzalność pozycjonowania RP* obliczono z wzoru (4) [9, 14]:

gdzie poszczególne składniki wzoru (4) obliczane są z zależności (5):

Średnia arytmetyczna dla kolejnych obliczonych lj (6):

Odchylenie standardowe (ang. standard deviation) dla kolejnych uzyskanych pozycji (7):
5.3. Wyniki badań
Ilustracja (rys. 8) obrazuje rozrzut osiąganej współrzędnej Z dla punktu P2. Ruch liniowy LIN przebiegał pomiędzy punktami P1 i P2 przy różnych zadanych prędkościach. Warto zwrócić uwagę na fakt, że dla najniższej ustalonej prędkości 0,01 m/s wartość μ (średnia uzyskanych pozycji) osiąga najmniejszą wartość wynoszącą ok. (-0,0066 mm). Zadana współrzędna Z wynosiła 0,0 mm, a wszystkie realnie osiągane punkty znajdowały się na ujemnej części osi Z (punkt TCP narzędzia przekraczał zadeklarowaną programowo wartość).
Analiza wyników obliczeń dla prędkości od 0,01 m/s do 1 m/s pokazuje, że parametr s (odchylenie standardowe) dla tych wartości posuwów ma porównywalną wartość oscylującą wokół 0,0008 mm. Przedstawia się to na wykresie w postaci bardziej skupionej serii kolejnych pomiarów (mniejszy rozrzut). Wraz ze wzrostem prędkości posuwu, parametr μ konsekwentnie wzrasta.
Oznacza to, że dla coraz większych prędkości pozycjonujących średnia z otrzymanych położeń w osi Z posiada coraz większą wartość. Pozycjonowanie staje się mniej dokładne.
Dla prędkości 1,5 m/s parametr s ponad półtorakrotnie zwiększa swoją wartość, przez co na ilustracji graficznej linia osiąganych punktów dla zaprogramowanej pozycji wydłuża się.
Świadczy to o większym rozrzucie kolejno osiąganych pozycji.
Zestawienie (tabela 1) pokazuje, w jaki sposób kształtowały się parametry AP* (dokładność) i RP* (powtarzalność) (obliczone zgodnie z formułami (1-7)) dla kolejno przyjmowanych prędkości ruchu liniowego.
Wraz ze wzrostem prędkości obserwuje się mniejszą dokładność i powtarzalność pozycjonowania. Z uwagi na niewielką masę narzędzia pomiarowego, nawet dla dużego posuwu wynoszącego 1,5 m/s, parametr AP* osiąga znacznie lepszą wartość, niż deklarowana przez producenta wartość 0,6 mm. Odmienna sytuacja dotyczy parametru RP*, który dla posuwu wynoszącego 1,5 m/s o 30% przekracza wartość znamionową (deklarowana wartość 0,03 mm).
6. Podsumowanie
Jeśli robot wykonuje pracę z dedykowanym narzędziem, posiadającym określoną masę i związane z tym wartości osiowych momentów bezwładności, to jest to pewna stała cecha fizyczna, której nie można zmienić, aby wpłynąć na poprawę dokładności i powtarzalności pozycjonowania.
Przeprowadzone badania pokazały, że przez pewne działania można wpływać na powtarzalność i dokładność pozycjonowania robota. W tym przykładzie wykorzystano czynnik, jakim jest wartość prędkości ruchu, wpływająca na ostatecznie uzyskiwane wartości AP* i RP* dla poszczególnych pozycji. Dla coraz mniejszych prędkości najazdowych, pozycjonowanie do zadanego punktu osiągane jest z lepszą dokładnością i powtarzalnością.
W warunkach przemysłowych kryterium decyzyjnym jest kompromis pomiędzy czasem wykonania pojedynczego cyklu stanowiskowego a dokładnością jego realizacji. Dlatego też najrozsądniejszym rozwiązaniem jest takie dobieranie prędkości przejazdów, aby ruchy w pozycjach pośrednich dla zaoszczędzenia czasu były wykonywane z większymi prędkościami. Ruchy pomiarowe powinny być wykonywane z odpowiednio mniejszymi prędkościami, umożliwiającymi dokładne zarejestrowanie mierzonych parametrów.
Uzyskane wartości AP* i RP* dla niewielkich prędkości ruchu wypadają dużo lepiej, niż parametry deklarowane przez producenta dla wartości maksymalnych. Ma to bezpośredni związek z niewielką masą narzędzia zainstalowanego na flanszy robota w stosunku do udźwigu nominalnego opisywanego modelu manipulatora.
Dostarczona do użytkownika wraz z robotem przemysłowym dokumentacja dostarcza nikłych informacji odnośnie dokładności i powtarzalności pozycjonowania. Informacje ograniczają się do podania błędu powtarzalności dla pozycjonowania we wszystkich osiach układu współrzędnych. Badania, w świetle których te parametry zostały zmierzone, wykonywane są dla pełnego obciążenia robota, które jednak w praktyce zdarza się bardzo rzadko. Dlatego też użytkownik sugerując się wartością deklarowanej przez producenta powtarzalności, może nie wykorzystywać w pełni możliwości manipulatora. Jak pokazały badania, dla niewielkich obciążeń interfejsu robota i prędkości najazdowych osiągane parametry AP* i RP* są znacząco lepsze od deklarowanych.
Opisywane zagadnienia są fragmentem szerszego programu badań. Ich celem jest oszacowanie zdolności pomiarowych dla zbudowanego stanowiska oraz estymacja niepewności pomiarowej dla mierzenia cech geometrycznych rzeczywistych wyrobów.
Artykuł został zrealizowany w Katedrze Technologii Maszyn i Automatyzacji ATH w ramach prac związanych z badaniami nad niepewnością pomiarów realizowanych przez inspekcyjny robot przemysłowy.
Bibliografia
1. Stryczek R., Dutka P., The analysis of signal disruptions from an optical triangulation measurement sensor, MAM, Vol. 62, No. 02, 2016, .
2. Dutka P., Metoda wyznaczenia TCP narzędzia dla triangulacyjnej głowicy pomiarowej współpracującej z robotem przemysłowym, "Pomiary Automatyka Robotyka", R. 20, Nr 3/2016, 65-70, DOI: 10.14313/PAR_221/65.
3. KEYENCE: High-speed, high-accuracy laser displacement sensor, LK-G5000 Series, user’s manual (2010).
4. KUKA Roboter GmbH: Trainer Guide, Use and Programming of Industrial Robots, V1, en.pdf, training guide (2013).
5. KUKA Roboter GmbH: e6c77545-9030-49b1-93f5- 4d17c92173aa_Spez_KR_AGILUS_sixx_en.pdf, Product specification, (2014).
6. Kluz R., Walidacja wyposażenia zrobotyzowanego stanowiska montażowego, "Technologia i Automatyzacja Montażu", 1/2014, 23-27.
7. Conrad K., Shiakolas P., Yih T.C., "Robotic calibration issues: accuracy, repeatability and calibration", Proceedings of the 8th Mediterranean Conference on Control & Automation (MED 2000), Rio, Patras, Greece, 17-19 July 2000.
8. Bergström G., Method for calibration of off-line generated robot program, Master of Science Thesis, Department of Automatic Control; Division of Automation and Mechatronics, Chalmers University of Technology, Göteborg, Sweden, 2011.
9. Wiśniewski M., Badania dokładności i powtarzalności pozycjonowania robotów przemysłowych, Rozprawa doktorska, Poznań 2015.
10. Dias J de Oliveira, Beitrag zu einem anwendungsorientierten Meß- und berechnungsverfahren zur Bestimmung der Kalibrierparameter von Referenzen 163 kinematischen Ketten, Diplomarbeit, Universität Hamburg/Universität der Bundeswehr Hamburg 1998.
11. Kreidler V., Development and Software Methods for Parallel Kinematic Machine Accuracy. [in:] Neugebauer, R.
(Hrsg.): Arbeitsgenauigkeit von Parallel kinematiken.
Tagungsband des 2. Chemnitzer Parallelkinematik Seminars, Verlag Wissenschaftliche Scripten. 2000, 241-256.
12. Meyer V., Measurement uncertainty - review, "Journal of Chromatography A", 1158 (2007), 15-24, Elsevier, March 2007.
13. PN-EN ISO 9283 : 2003 - Roboty przemysłowe - Metody badania charakterystyk funkcjonalnych.
14. Weichert F., Bachmann D., Rudak B., Fisseler D.: Analysis of the accuracy and robustness of the leap motion controller, "Sensors" 13.2013, 6380-6393, DOI: 10.3390/ s130506380.













KOMENTARZE (0)
Do artykułu: Czynniki wpływające na dokładność i powtarzalność pozycjonowania robota przemysłowego